Fast Company racconta la storia di Etak, una società che 30 anni addietro cominciò a commercializzare il primo navigatore per automobili, un dispositivo per l’epoca incredibile tenendo conto che nel 1985 il sistema di posizionamento globale noto come GPS (Global Positioning System) non esisteva e che quest’ultimo divenne pienamente operativo molti anni dopo (il servizio, inizialmente riservato a scopi militari, fu aperto al mondo nel 1995).
La società Etak nacque dall’idea dell’ingegner Stan Honey e grazie all’appoggio finanziario di Nolan Bushnell, il co-fondatore di Atari. L’idea era così avanti sui tempi che fu necessario digitalizzare e gestire in proprio le mappe, un compito non facile tenendo conto che all’epoca non esistevano memory card, dischi ottici o collegamenti internet.

L’idea per il Navigator di Etak nacque in mare: Bushnell aveva assunto Honey per pilotare il suo yacht Charley per il Transpacific Yacht Race del 1983, un prestigioso evento che prevede l’attraversamento di 2,225 miglie nautiche da Los Angeles a Honolulu. Una mattina, intorno alle 4, ai due uomini (Honey e Bushnell) capitò il turno di notte; mentre il resto dell’equipaggio dormiva, cercavano di individuare la loro posizione sfruttando un satellite che orbitava intorno alla terra e che passava sopra le loro teste ogni 12 ore. Sfruttando il cosiddetto effetto Doppler alcuni dispositivi specializzati sono in grado di individuare con precisione latitudine e longitudine di un’imbarcazione. Si tratta ad ogni modo solo di un valore di partenza: è necessario calcolare con antiche tecniche di navigazione astronomica anche lo spostamento usando un sestante, misurando l’angolo di elevazione di un oggetto celeste sopra l’orizzonte.
Per quest’ultima fase Honey, che quando non era in mare lavorava al leggendario istituto di ricerca SRI International della Silicon Valley, sfruttava uno dei primi computer specifici per la navigazione marittima, usato per raccogliere dati da alcuni sensori ed eseguire calcoli. Anche se si poteva sfruttare un computer, la navigazione senza GPS non era per niente semplice. Scherzando sulla difficoltà nell’individuare la rotta, i due uomini pensavano che sarebbe stato tutto più semplice se non avessero dovuto eseguire quei calcoli. Bushnell e Honey a un certo punto cominciarono a fantasticare di un sistema di navigazione assistito da computer per l’uso a terra, da usare con le automobili. Honey suppose che era possibile stimare il tempo di percorrenza conoscendo la località di partenza su un punto noto di una mappa, senza bisogno di ricorrere a un satellite; tutto quello che occorreva era una buona mappa digitale, una buona bussola e alcuni sensori. Sfruttando questi ultimi elementi sarebbe stato possibile visualizzare i dettagli del percorso su uno schermo.
“Facciamolo!” disse Bushnell, spiegando che avrebbe finanziato il tutto. E fu così che il tutto iniziò; al ritorno dal viaggio, Honey si mise a lavorare al progetto. Aveva vasta esperienza avendo lavorato a vari progetti militari e governativi nel campo dell’elettronica e dell’informatica, e partecipato come navigatore in varie imprese con la barca a vela. Bushnell mise a disposizione gli uffici di Catalyst Technologies (uno dei primi “incubatori” al mondo) e a partecipare al progetto furono chiamati Ken Milnes e Alan Phillips (due colleghi di Honey che lavoravano all’SRI); dopo pochi mesi al gruppo si unì l’ingegner Walter Zavoli (anche lui proveniente dall’SRI).
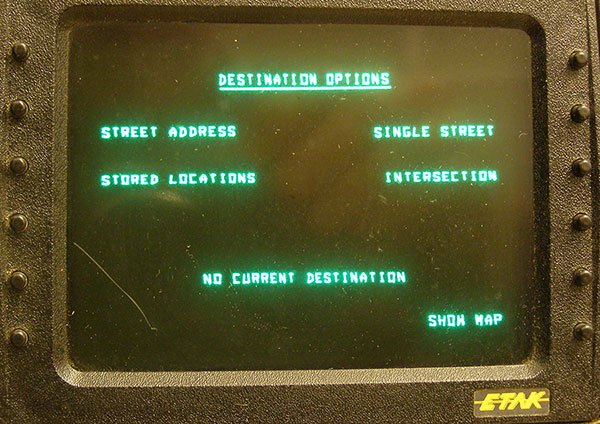
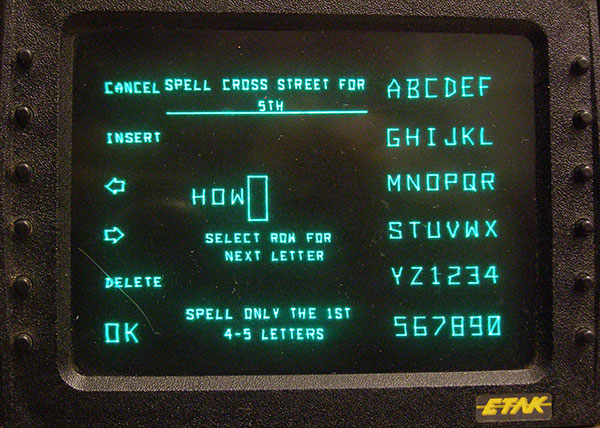
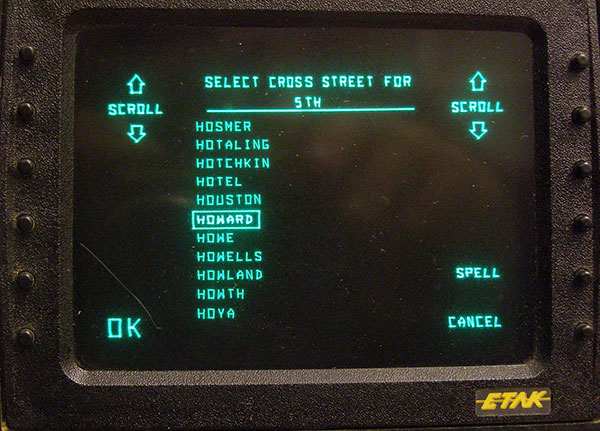
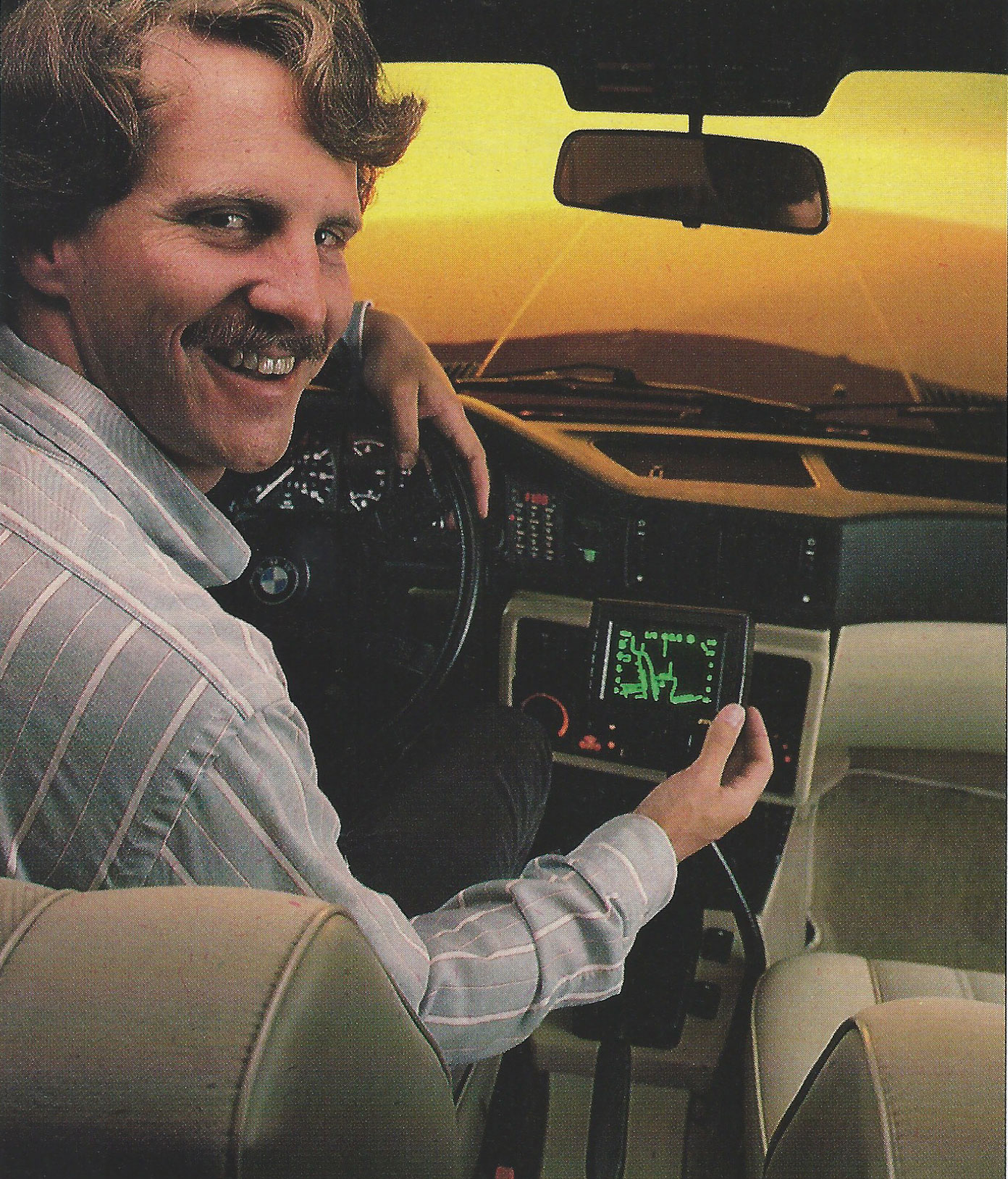
L’idea era creare un sistema di navigazione installabile aftermarket come accessorio nelle auto. Il dispositivo avrebbe suggerito i percorsi sfruttando un display CRT da montare sul cruscotto, guidando l’automobilista e disegnando le località man mano toccate per arrivare a destinazione.
 La parte di sviluppo hardware era relativamente semplice; oltre a bussola, computer e display vi erano però da risolvere problemi matematici complessi che richiedevano analisi di dati, la creazione di specifici algoritmi e mappe. Dove prendere i dati delle mappe, come memorizzarli e come accedere a questi velocemente? A un certo punto il team si rese conto che era necessario avvalersi di qualcuno con competenze in topologia in grado di comprendere allo stesso tempo i meccanismi del digital mapping. “Solo due persone erano adatte al compito” spiega Honey; “una di queste l’avevo conosciuta in modo del tutto casuale in riunione familiare ed era Marvin White, che lavorava all’Ufficio Censimenti statunitense”. Sin dalla fondazione, l’ufficio censimenti aveva avuto bisogno di dati precisi sulle mappe. Nel 1960 gli esperti di statistica dell’ufficio decisero che l’allora nuovo emergente campo dei computer avrebbe potuto essere di aiuto nel creare mappe più accurate e migliorare gli itinerari da percorrere per la consegna della posta e l’acquisizione delle informazioni porta a porta. Nel procedimento avevano inventato un modo efficace per memorizzare digitalmente dati sulle mappe sfruttando meccanismi di codifica che tenevano conto di punti, vettori e poligoni denominati DIME (Dual Independent Map Encoding). White si unì al gruppo per mettere a disposizione le sue conoscenze matematiche e aiutando a creare algoritmi per il primo sistema di navigazione per auto.
La parte di sviluppo hardware era relativamente semplice; oltre a bussola, computer e display vi erano però da risolvere problemi matematici complessi che richiedevano analisi di dati, la creazione di specifici algoritmi e mappe. Dove prendere i dati delle mappe, come memorizzarli e come accedere a questi velocemente? A un certo punto il team si rese conto che era necessario avvalersi di qualcuno con competenze in topologia in grado di comprendere allo stesso tempo i meccanismi del digital mapping. “Solo due persone erano adatte al compito” spiega Honey; “una di queste l’avevo conosciuta in modo del tutto casuale in riunione familiare ed era Marvin White, che lavorava all’Ufficio Censimenti statunitense”. Sin dalla fondazione, l’ufficio censimenti aveva avuto bisogno di dati precisi sulle mappe. Nel 1960 gli esperti di statistica dell’ufficio decisero che l’allora nuovo emergente campo dei computer avrebbe potuto essere di aiuto nel creare mappe più accurate e migliorare gli itinerari da percorrere per la consegna della posta e l’acquisizione delle informazioni porta a porta. Nel procedimento avevano inventato un modo efficace per memorizzare digitalmente dati sulle mappe sfruttando meccanismi di codifica che tenevano conto di punti, vettori e poligoni denominati DIME (Dual Independent Map Encoding). White si unì al gruppo per mettere a disposizione le sue conoscenze matematiche e aiutando a creare algoritmi per il primo sistema di navigazione per auto.
Il team di Honey iniziò ad assumere gruppi di digitalizzatori, impiegati che dovevano prelevare dati pubblicamente disponibili nelle mappe e memorizzarli in un computer (si partì dai dati della San Francisco Bay Area). Gli ingegneri svilupparono un sistema proprietario per velocizzare il procedimento, creando strumenti software che correggevano le distorsioni nelle scansioni delle foto aeree, altra innovazione chiave nel settore. Sfruttando questi strumenti riuscivano a digitalizzare le mappe più velocemente da metodi tentati in precedenza che in pratica richiedevano l’inserimento manuale, punto per punto, di luoghi di riferimento e strade.
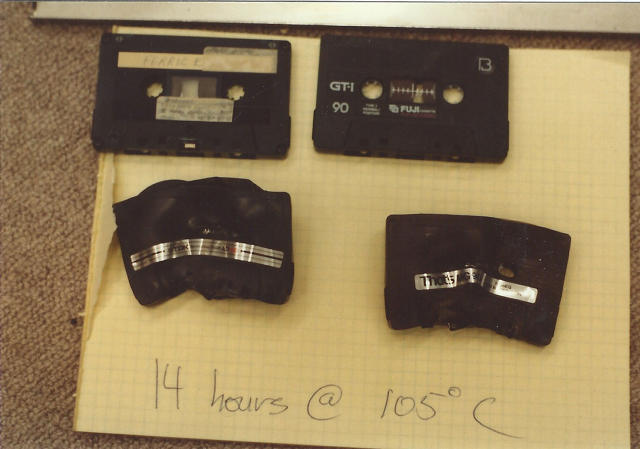
Per la memorizzazione dei dati si puntò verso un sistema resistente alle vibrazioni e in grado di resistere al caldo anche in auto: un lettore di musicassette a nastro magnetico che si rivelò più economico e robusto rispetto ai meccanismi dei drive per floppy disk. Su ogni cassetta era possibile memorizzare 3.5MB di dati, che potevano sembravano tanti per gli standard dell’epoca ma che facevano in modo che per i dati della sola Bay Area era necessario sfruttare ben sei cassette (l’utente doveva eseguire quando necessario lo switch passando al diverso supporto con i dati). Fu necessario sperimentare vari materiali per gli involucri delle audiocassette (le quali tendevano a rovinarsi troppo facilmente per via del caldo) scegliendo alla fine quelle realizzate con l’involucro in policarbonato, in grado di supportare l’esposizione a temperature anche molto elevate.
Per quanto riguarda il computer si sfruttò in pratica un classico PC IBM-compatibile dell’epoca, inserito all’interno di un telaio di alluminio delle dimensioni di una scatola di scarpe. Per il display si sfruttò un monitor CRT vettoriale, un display in grado di tracciare solo linee tra punti arbitrari, sulla falsariga di quelli usati per giochi Atari come Asteroids. Fu scelto un monitor vettoriale perché all’epoca un monitor con risoluzione sufficiente per visualizzare grafica bitmapped sarebbe stato troppo costoso, incrementando in modo proibitivo il costo del navigatore.
Poiché non si poteva ottenere aiuto dai satelliti, per “comprendere” il mondo circostante il sistema faceva affidamento esclusivamente ad alcuni sensori. Fu progettata una bussola digitale personalizzata da montare nel parabrezza e una serie di sensori per le ruote con i quali determinare velocità, distanza percorsa e cambio di direzione.
Sperimentando varie modalità di visualizzazione delle mappe vettoriali, il team si rese conto che anziché mostrare il solo punto di vista del guidatore, era meglio indicare l’auto su un punto fisso della mappa, un concetto che oggi appare scontato ma che all’epoca non lo era. L’idea della macchina vista dall’alto ricordava a Honey antichi concetti di navigazione polinesiana dei quali aveva letto anni prima durante i suoi studi sulla navigazione .Gli antichi marinai di quella regione solcavano i mari affidandosi a una serie di segnali ambientali quali ad esempio la posizione di alcune isole intorno a loro, insieme alla percezione mentale di immaginare se stessi al centro del sistema di navigazione concettuale che avevano nella loro testa. Fu per questo che Honey decise di chiamare la società Etak, termine polinesiano che indica l’antico sistema di navigazione polinesiano che tiene conto dei punti circostanti.
Quando il sistema fu finalmente completato, funzionava talmente bene che chi aveva modo di provarlo pensava ci fosse qualche trucco. “Non riuscivano a credere che funzionasse”, spiega Honey. “È incredibile da dire, ma era difficile da vendere perché le persone non pensavano che un simile sistema potesse esistere”.
Ancora oggi molti sistemi di navigazione satellitare sfruttano tecniche per la gestione dei dati delle mappe elaborate dalla società di Honey: una su tutte a tecnica del “dead reckoning” che permette di stimare la navigazione misurando la lunghezza del passo e la direzione, calcolando di conseguenza stima della posizione corrente.
Il navigatore fu sviluppato per tutto il 1984 e nelle fasi di testing furono predisposti due modelli: il 700, fornito di serie con uno schermo da 7″, e il 450 che prevedeva uno schermo da 4.5″. Il dispositivo fu ribattezzato Etak Navigator e mostrato alla stampa alla fine del 1984.
L’anno in questione non fu purtroppo un buon periodo per il primo investitore di Etak: Nolan Bushnell perdeva soldi in molte altre attività e con mille difficoltà i due dispositivi arrivano ad ogni modo sul mercato nel luglio del 1985, con il modello 450 venduto a 1395$ (equivalenti a 3083$ di oggi) e il 700 venduto a 1595$. Le mappe su cassetta costavano 35$ l’una. Solo la Bay Area della California era inizialmente disponibile e in seguito furono disponibili le cassette con altre principali aree metropolitane. I rivenditori di autoradio installavano e calibravano il tutto, un procedimento che richiedeva almeno un paio di ore. Il dispositivo era così avanti sui tempi che per almeno due anni non erano presenti concorrenti. Molti dei dispositivi che arrivarono dopo, furono realizzati grazie al licesing di brevetti hardware e software concessi da Etak. I prezzi dell’epoca non rendevano il dispositivo adatto a tutte le tasche ma molti dispositivi furono venduti a società che avevano bisogno di gestire flotte di automezzi quali Coca-Cola e UPS che li usavano per le consegne e il calcolo dei percorsi ottimali.
Honey stima che furono venduti tra i 2000 e i 5000 dispositivi, con il modello da 4.5″ installato principalmente sulle auto private e il modello da 7″ dagli autotrasportatori. La società si allontanò dal settore hardware alla fine degli anni 80, lavorando per conto di centinaia di mapper in tutto il mondo e specializzandosi nella digitalizzazione di molte delle strade e punti di riferimento terrestri. Alcuni dati elaborati da Etak sono tutt’oggi usati in applicazioni quali ad esempio l’app Mappe di Apple.
Etak fu comprata nel 1989 dal magnate dei media australiano Rupert Murdoch per 25 milioni di dollari e Honey diventò vice presidente responsabile delle tecnologie di News Corp. Etak è stata acquistata da varie società: da Sony nel 1996 per 100 milioni di dollari e poi da TomTom dove alcune tecnologie originarie sono ancora tutt’oggi usate con i nuovi sistemi di navigazione satellitare.