
Bosch è da tempo impegnata nella produzione di diversi componenti fondamentali per guida automatica (si dice, tra le altre cose, che è anche uno dei partner di Apple per il cosiddetto “Project Titan”/Apple Car). Queste tecnologie prevedono il coinvolgimento di sistemi di propulsione e trasmissione, freni, sterzo, strumenti di visualizzazione, navigazione, sensori, così come la connettività all’interno e all’esterno del veicolo. Sul sito del produttore tedesco sono elencati molti sistemi coinvolti nella guida autonoma e il loro scopo. Di seguito un elenco di quelli più importanti:
 Connected Horizon: I veicoli automatizzati si affidano a informazioni relative all’ambiente circostante che vanno al di là di quelle captate dai sensori. Per esempio, i veicoli richiedono dati sul traffico in tempo reale relativi a ingorghi e incidenti. Per ottenerli è necessario collegare il veicolo a un server e per questo è stata sviluppata una soluzione denominata “Connected Horizon.” Questo sistema permette una anteprima dinamica del percorso e i corrispondenti adeguamenti alla strategia di guida. È la soluzione che permette ai veicoli automatizzati di guardare avanti. Questo è un vantaggio in termini di comfort e sicurezza dell’esperienza di guida. Per esempio, i veicoli connessi vengono avvertiti in anticipo dei punti di pericolo prima di una curva cieca o della sommità di una collina e possono rallentare per prepararsi.
Connected Horizon: I veicoli automatizzati si affidano a informazioni relative all’ambiente circostante che vanno al di là di quelle captate dai sensori. Per esempio, i veicoli richiedono dati sul traffico in tempo reale relativi a ingorghi e incidenti. Per ottenerli è necessario collegare il veicolo a un server e per questo è stata sviluppata una soluzione denominata “Connected Horizon.” Questo sistema permette una anteprima dinamica del percorso e i corrispondenti adeguamenti alla strategia di guida. È la soluzione che permette ai veicoli automatizzati di guardare avanti. Questo è un vantaggio in termini di comfort e sicurezza dell’esperienza di guida. Per esempio, i veicoli connessi vengono avvertiti in anticipo dei punti di pericolo prima di una curva cieca o della sommità di una collina e possono rallentare per prepararsi.
Electric Power Steering (EPS): Il sistema Electric Power Steering (EPS) con funzionamento a seguito di avaria è una funzione che consente al guidatore o al sistema di pilota automatico di minimizzare il rischio pur mantenendo un supporto allo sterzo elettrico di circa il 50% (nel raro caso di un guasto singolo). Questa tecnologia, spiega il produttore, consentirà agli OEM di adempiere alle disposizioni sulle strategie di fallback proposte nei documenti Federal Automated Vehicles Policy dal Dipartimento dei trasporti degli Stati Uniti d’America e dalla National Traffic Highway Safety Adminstration.
 Sistema elettronico di stabilità (ESP): Anche il sistema elettronico di stabilità svolge un ruolo essenziale nella guida autonoma. Delegare la responsabilità della guida al veicolo richiede che i sistemi critici per la sicurezza, come i freni, soddisfino requisiti speciali. Per avere il massimo controllo di questi sistemi in caso di guasto, è necessario creare ridondanza nel sistema come forma di protezione. Il sistema elettronico di stabilità e il servofreno elettromeccanico iBooster possono frenare in modo indipendente il veicolo senza alcun intervento da parte del guidatore.
Sistema elettronico di stabilità (ESP): Anche il sistema elettronico di stabilità svolge un ruolo essenziale nella guida autonoma. Delegare la responsabilità della guida al veicolo richiede che i sistemi critici per la sicurezza, come i freni, soddisfino requisiti speciali. Per avere il massimo controllo di questi sistemi in caso di guasto, è necessario creare ridondanza nel sistema come forma di protezione. Il sistema elettronico di stabilità e il servofreno elettromeccanico iBooster possono frenare in modo indipendente il veicolo senza alcun intervento da parte del guidatore.
HMI: La guida autonoma cambierà l’interfaccia uomo-macchina e introdurrà concetti moderni di comunicazione tra auto e guidatore. Il guidatore deve essere in grado di comprendere e utilizzare intuitivamente il sistema. il quadro comandi TFT, per esempio, offre flessibilità e chiarezza. Gli HUD si posizionano nel campo visivo del guidatore mostrando informazioni come velocità, suggerimenti di navigazione e avvisi. Queste informazioni vengono visualizzate e proiettate a una distanza di circa 2 metri davanti al veicolo “fondendosi” con l’ambiente circostante.
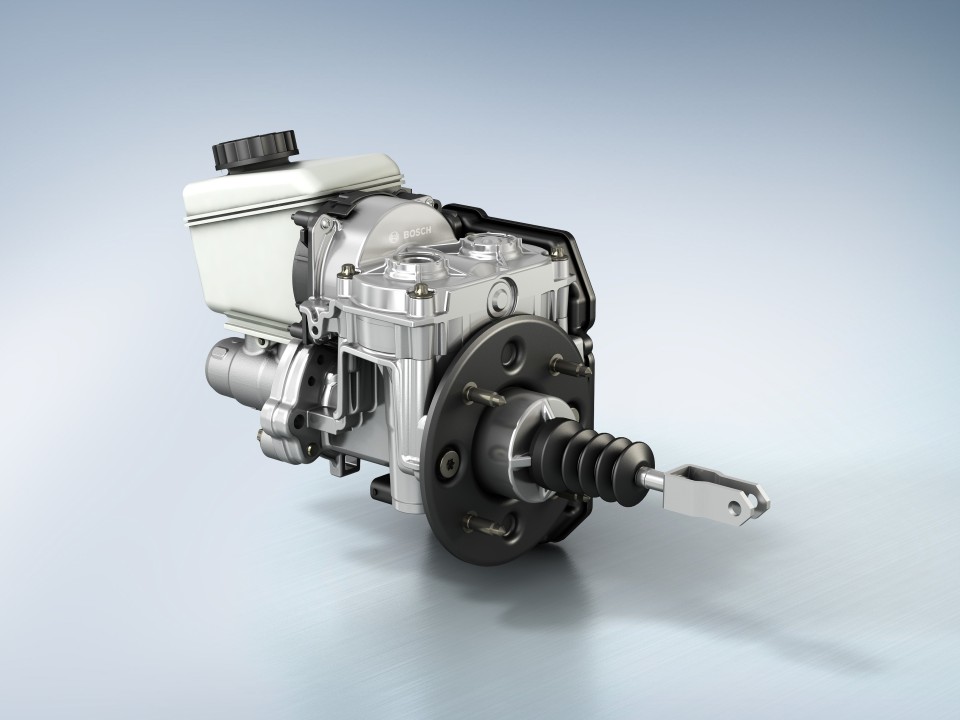 iBooster: l’iBooster è un servofreno a controllo meccanico che può operare senza la generazione di vuoto da parte del motore a combustione interna e rimane attivo durante la guida a trazione elettrica, soddifando i requisiti dei moderni sistemi frenanti. Può essere utilizzato in tutti i sistemi di propulsione e trasmissione ed è particolarmente adatto per i veicoli ibridi ed elettrici, aumentando la loro autonomia fino al 20%.
iBooster: l’iBooster è un servofreno a controllo meccanico che può operare senza la generazione di vuoto da parte del motore a combustione interna e rimane attivo durante la guida a trazione elettrica, soddifando i requisiti dei moderni sistemi frenanti. Può essere utilizzato in tutti i sistemi di propulsione e trasmissione ed è particolarmente adatto per i veicoli ibridi ed elettrici, aumentando la loro autonomia fino al 20%.
Nell’iBooster, il sensore di corsa del pedale integrato registra l’attivazione del pedale del freno e la trasmette all’unità di controllo. L’unità di controllo calcola il segnale di attivazione per il motore elettrico che utilizza una trasmissione a due fasi per convertire la propria coppia nella potenza ausiliaria necessaria. In un cilindro principale standard, la potenza fornita dal booster viene trasformata in pressione idraulica.
Mappe: Senza mappe aggiornate ad alta risoluzione non può esistere guida autonoma. Le mappe forniscono ai veicoli informazioni sui cambiamenti delle condizioni del traffico, come ingorghi o cantieri, che non rientrano nell’area che può essere monitorata dai sensori a bordo. Sensori radar e video catturano e trasmettono importanti dati sul traffico in tempo reale per la creazione di mappe ad alta risoluzione per la guida autonoma.
Sensore LiDAR: Oltre ai sensori radar, video e a ultrasuoni, tutti i big che hanno creato/stanno creando prototipi di veicoli automatizzati utilizzano anche sensori LiDAR (Laser Imaging Detection and Ranging) per il telerilevamento di oggetti e superfici. I vari principi dei sensori si completano a vicenda con i sistemi e combinano dati per assicurare un riconoscimento affidabile dell’ambiente circostante. I software presenti nei veicoli autonomi utilizzano i dati letti da questi sensori per stabilire strategie di guida.
 Sensore radar: I sensori radar forniscono importanti informazioni a 360 gradi sull’ambiente circostante entro una distanza fino a 250 metri per i veicoli automatizzati. Il compito principale di un sensore radar è rilevare gli oggetti e misurare la loro velocità e posizione relativamente al movimento del veicolo. Alcuni sensori radar inviano onde radio a modulazione di frequenza comprese tra 76 e 77 GHz tramite un’antenna di trasmissione. Queste onde sono riflesse dagli oggetti che si trovano davanti al veicolo. La velocità e distanza relative degli oggetti sono misurate utilizzando l’effetto Doppler e il ritardo generato dai cambi di frequenza tra il segnale emesso e ricevuto. Confrontando l’ampiezza e la fase dei segnali radar misurati è possibile trarre una conclusione sulla posizione dell’oggetto.
Sensore radar: I sensori radar forniscono importanti informazioni a 360 gradi sull’ambiente circostante entro una distanza fino a 250 metri per i veicoli automatizzati. Il compito principale di un sensore radar è rilevare gli oggetti e misurare la loro velocità e posizione relativamente al movimento del veicolo. Alcuni sensori radar inviano onde radio a modulazione di frequenza comprese tra 76 e 77 GHz tramite un’antenna di trasmissione. Queste onde sono riflesse dagli oggetti che si trovano davanti al veicolo. La velocità e distanza relative degli oggetti sono misurate utilizzando l’effetto Doppler e il ritardo generato dai cambi di frequenza tra il segnale emesso e ricevuto. Confrontando l’ampiezza e la fase dei segnali radar misurati è possibile trarre una conclusione sulla posizione dell’oggetto.
 Sensori ad ultrasuoni: I sensori ad ultrasuoni sono necessari nella guida autonoma principalmente per il riconoscimento dell’ambiente vicino, fino a 6 metri e a basse velocità, come in fase di parcheggio. I sensori impiegano la tecnica del sonar, utilizzata, per esempio, anche dai pipistrelli nella loro navigazione. Emettono brevi segnali ad ultrasuoni che vengono riflessi dagli ostacoli. L’eco è registrata dai sensori e analizzata da un’unità di controllo centrale.
Sensori ad ultrasuoni: I sensori ad ultrasuoni sono necessari nella guida autonoma principalmente per il riconoscimento dell’ambiente vicino, fino a 6 metri e a basse velocità, come in fase di parcheggio. I sensori impiegano la tecnica del sonar, utilizzata, per esempio, anche dai pipistrelli nella loro navigazione. Emettono brevi segnali ad ultrasuoni che vengono riflessi dagli ostacoli. L’eco è registrata dai sensori e analizzata da un’unità di controllo centrale.
Sensore video: Con un campo di misurazione 3D di oltre 50 metri, le videocamere stereoscopiche forniscono importanti informazioni ottiche sull’ambiente circostante il veicolo. Una videocamera stereoscopica cattura gli oggetti a livello spaziale e calcola la loro distanza. Inoltre, identifica gli spazi vuoti. Le informazioni provenienti dal sensore sono combinate con i dati provenienti da altri principi dei sensori per generare un modello dell’ambiente circostante per i veicoli automatizzati.













